
Strike & Terminal Engagement
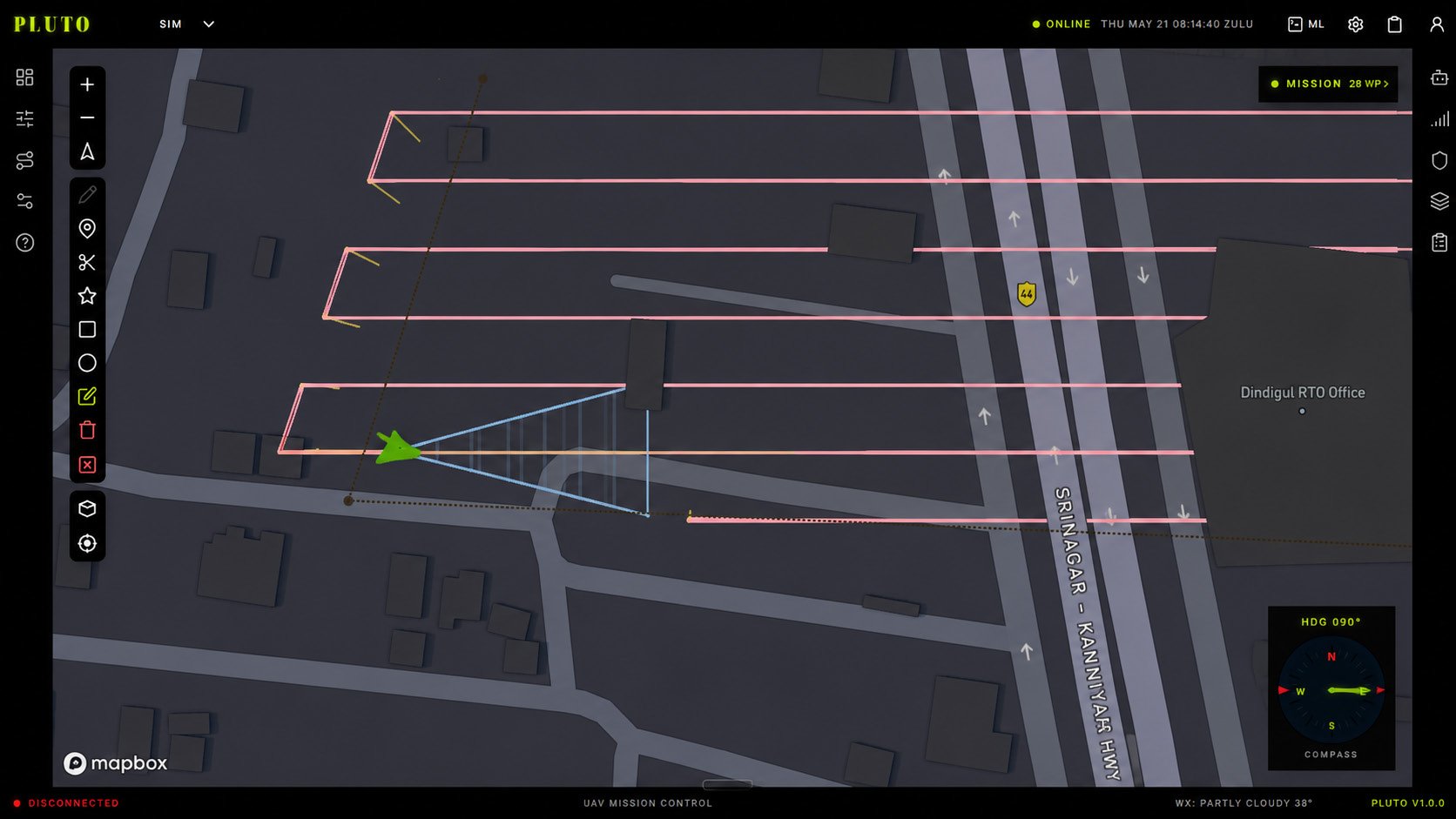
Autonomous loitering munitions and kamikaze drone operations with onboard terminal guidance. PLUTO orchestrates multi-agent simultaneous strike sequencing with fully deconflicted ingress corridors.
Autonomous Systems · 01
Autonomous Command & Control Software
Software defined aerial operating system engineered for mission execution, adaptive flight intelligence, and real-time tactical coordination.
Optimized for multi-agent drone swarm control, collaborative navigation, and software-defined unmanned operations.
Autonomous loitering munitions and kamikaze drone operations with onboard terminal guidance. PLUTO orchestrates multi-agent simultaneous strike sequencing with fully deconflicted ingress corridors.

Long-dwell multi-sensor ISR across wide-area battlespace or critical infrastructure. Plug-and-play payload support via hardware SDK for both tactical ISR and industrial inspection.

Up to 20 simultaneous agents under a single operator with adaptive mesh telemetry. Dynamic role assignment and collision-free path planning with real-time deconfliction across all agents.
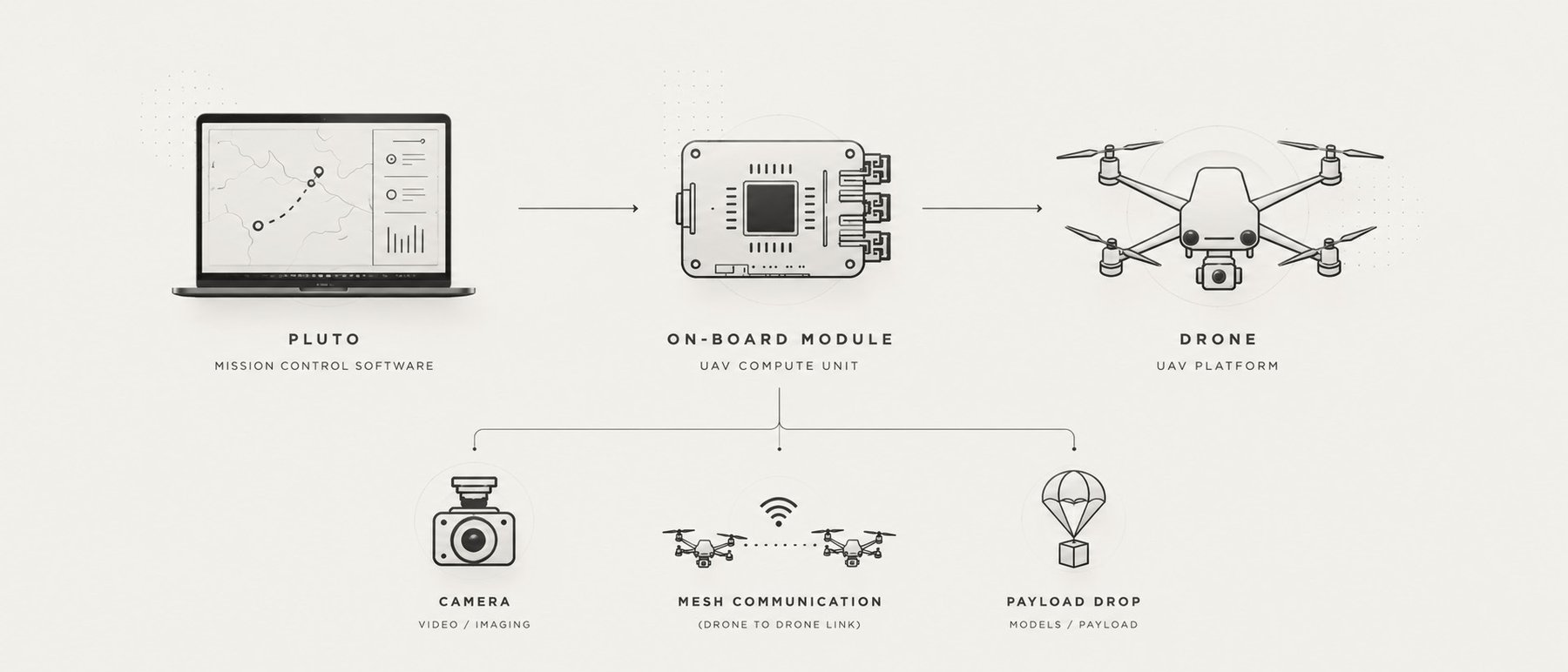
PLUTO operates as the onboard autonomous mission core, where each UAV hosts an onboard compute node interconnected through adaptive mesh telemetry for distributed autonomous coordination across drones, payloads, and mission subsystems.